Introduction
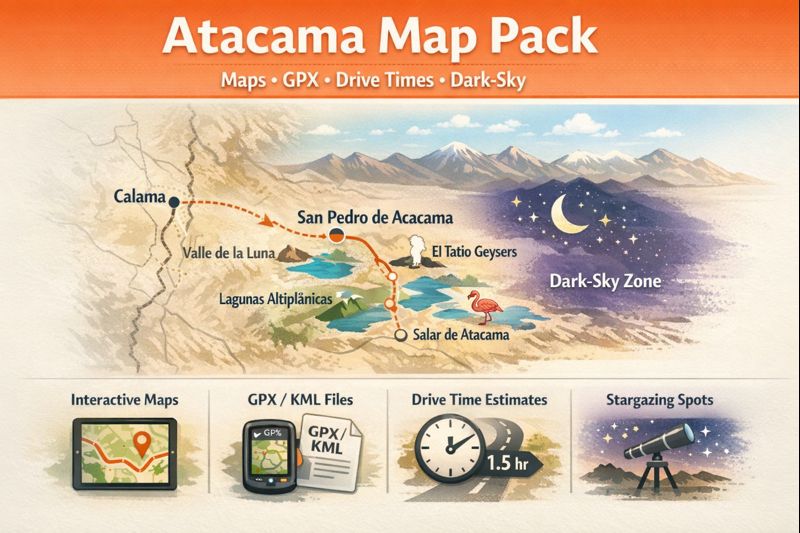
The Atacama Map Pack includes interactive and printable maps, downloadable GPX/KML/GeoJSON files, and skeptical drive-time projections with dark-sky overlays. It is a map-driven, photo-oriented, and data-driven toolkit to assist photographers, overlanders, planners, or stargazers in need of machine-friendly route data.
Why a “map-first” / NLP-inspired approach improves outcomes
A map-first strategy is analogous to an annotated corpus: plain text (unstructured suggestions) is weak for downstream automation. Structured spatial data with a consistent schema and documented provenance enables reusability, programmatic filtering, and robust offline inference.
Tokenization & segmentation. Breaking the region into logical tiles, linear routes, and waypoint tokens answers questions that free text alone cannot: is the track paved? Which token is nearest a refueling node? Segmentation clarifies where one itinerary ends and another begins.
Feature engineering. Converting raw tracks into enriched features (surface quality, typical transit time factor, altitude profile) produces engineered attributes useful for routing models and human decision-making.
Model-ready files. Delivering GPX/KML/GeoJSON allows both humans and models to consume the data seamlessly — download, validate, import into an app, or feed into a route-planning model.
Climate & weather patterns — signal vs. rare events
In an NLP parallel: the Atacama’s climate signal is hyper-arid — a dominant class label — with rare, high-impact outlier events (heavy rains, seasonal desert blooms). These outliers are akin to low-frequency tokens that nonetheless have outsized downstream effects on route validity and safety.
Hyper-aridity (dominant distribution). Long-term station data exhibit extremely low rainfall counts in many subregions. That baseline distribution creates a high probability of dry traversability and exceptional conditions for astronomy (low atmospheric water vapor).
Extreme events (outliers). When rare precipitation occurs, road closure flags and washout labels must be propagated through the route graph. The system must support dynamic reannotation: mark edges as closed=true and trigger alternative path inference.

Landscape features as entity types & spatial relations
Think of the region’s features as entities with typed relations.
Entity classes:
- Valle (Valle de la Luna): entity type geomorphological_feature, relations: proximal_to(San Pedro, 18km).
- Salar (Salar de Atacama): type salt_flat, attributes: reflectivity, hydrology_nodes.
- GeyserField (El Tatio): type thermo_geologic_site, attributes: elevation_m, best_time: sunrise.
Spatial relations & queries. One can express queries like FIND routes WHERE includes(Valle_de_la_Luna) AND surface_type != ‘highway’ — practical for building itinerary filters.
Flora & fauna — labeled conservation entities
The flora and fauna observations can serve as an ecological annotation: Phoenicopterus, the flamingo, is a species; the polygons of its occurrence are associated with the waypoints of lagoons (e.g., Laguna Chaxa polygon). Rare desert flowers are marked with temporal annotations on polygons based on provenance (satellite imagery, citizen reports). The existence of these labels is operationally equivalent to: NOENTRY, where it is Regrowing, MINIMIZETRAFFIC, where it is a polygon.
Human history & culture — provenance, ethics & consent
Treat cultural sites and indigenous motifs as sensitive annotations with access constraints: some nodes require community consent or have cultural protections. Include provenance metadata (source, community_contact, permit_requirements) and recommendation headers for respectful visitation.
Survival tips rephrased as best-practice rules & preconditions
Instead of simple tips, express travel safeguards as preconditions and guardrails — machine-readable checklists a human or app can evaluate:
Altitude precondition: if max_elevation(route) > 3500m then require ‘acclimatization’ and flag ‘pulse_oximeter_recommended’.
Water constraint: minimum_water_liters = max(2 * expected_hours, 4) with margin for heat stress at altitude.
Vehicle requirement inference:
if any(segment.surface_score >= 0.8 and segment.length_km > 5):
require_vehicle = ‘high_clearance_or_4x4’
else:
require_vehicle = ‘any’
Navigation guardrail: if offline_mode == true then require presence_of(‘GPX_file’) AND presence_of(‘printed_map’).
Environmental care policy: pack_out_trash = True; avoid_offtrack_travel = True; follow_regulated_routes = True.
These formal constraints can be translated into UI warnings or wired up to a route-validation function.
Tourism: attractions, activities & practical travel intents
Map traveller intents to recommended actions and data artifacts.
Intent → Recommended artifacts mapping:
- Photography → A3_print_map + golden_hour_waypoints + elevation_profiles + sun_azimuth_vector.
- 4x4_overlanding → KML with alternates + campsite_waypoints + fuel_POIs.
- Stargazing → dark_sky_geojson + minimal_light_contours + moon_phase_calendar.
Top attractions as high-value nodes: Each attraction is a high-importance node with ranking metadata (accessibility_score, photographic_value_score, crowding_index).
Map-first 1–7 day itineraries expressed as sequence models
Represent itineraries as ordered sequences of tokens (waypoints), each token augmented with attributes (time_window, difficulty, vehicle_recommendation). We provide canonical sequences for 1, 3, and 7-day plans; each sequence is accompanied by GPX/KML artifacts and a recommended vehicle type.
1-Day — Valle de la Luna Loop
Sequence tokenization: [San_Pedro_Start] → [Duna_Mayor] → [Cave_Crater_Walk] → [Sunset_Viewpoint] → [San_Pedro_End]
Vehicle: any (low surface difficulty).
File: valle-de-la-luna-loop.gpx (single-sequence GPX).
Operational note (inference): start time = afternoon; ensure headlamp for post-sunset egress; buffer = +20% to travel_time estimate.
3-Day — El Tatio + Lagunas Altiplánicas + Salar Circuit
Sequence decomposition:
- Day 1: Pre-dawn token for El_Tatio (depart ~04:00).
- Day 2: token cluster for high-alt lagoons [Miñiques, Miscanti], including acclimatization pause.
- Day 3: salar loop with flamingo observation token Laguna_Chaxa.
Vehicle: high-clearance or 4×4 recommended.
Files: 3day-high-altitude.gpx, lagunas-altiplanicas.gpx.
Operational inference: perform altitude_monitoring and cold_morning_prep subroutine.
7-Day — Full Northern Loop
This itinerary is a complex sequence with branching alternates (a small route lattice). Each segment has difficulty_tag and alternate_track links for seasonal closure. The deliverable is a zipped corpus: full-7-day-atacama.zip containing GPX/KML with difficulty tags and waypoint notes.
Vehicle: 4×4 with recovery gear, satellite communicator recommended.
Operational safety: evac_plan_required = true.
Driving times as probabilistic estimates and conservative priors
We provide a table where each leg is represented as (distance, conservative time estimate, confidence interval). Internally, these are built from historical speeds on similar surfaces and multiplied by a safety factor to create conservative priors.
| Route | Distance (approx) | Conservative time (prior) | Notes (features) |
| Calama → San Pedro de Atacama | 100 km | 1–1.5 hrs | main paved arterial |
| San Pedro → Valle de la Luna | 13–20 km | 30–45 mins | short dirt offshoots |
| San Pedro → El Tatio (Geysers) | 90–110 km | 1.5–2.5 hrs | early start + high altitude |
| San Pedro → Lagunas Altiplánicas | 120–180 km | 3–5 hrs | remote, higher variance |
| San Pedro → Salar de Atacama (Laguna Chaxa) | 55–70 km | 1–1.5 hrs | paved then graded access |
These are conservative priors — treat them as high-confidence lower bounds for planning. If you run a probabilistic routing model, use these as prior distributions and update with live telemetry.
Stargazing & observatory access as a discovery + permissioning pipeline
Why the Atacama is optimal for astronomy (signal properties). Low integrated precipitable water vapor and high plateaus increase the signal-to-noise ratio for night-sky observation. These environmental attributes make the region a global hub for facilities like ALMA and other telescopes. Access to scientific installations is typically restricted and requires official verification; community-run stargazing sessions are a common public alternative.
Dark-sky overlay design. The GeoJSON dark-sky overlay contains polygonal contours of light pollution intensity, candidate viewing nodes, and recommended approach segments. Use this overlay to programmatically select optimal stargazing nodes, taking into account moon phase and local weather forecast inputs.
Operational note: observatory visits may close for safety (weather or operations); validate access via official channels before planning.
Environmental issues & conservation as governance constraints
Treat environmental restrictions as rules in the routing engine: preserve sensitive polygons by assigning high penalty weights to any path segment intersecting those polygons during route optimization. For ephemeral events such as desert blooms, push a TEMPORARY_RESTRICT annotation to the relevant polygons and display warnings in both the interactive map and printable marginalia.
Interesting facts reframed as knowledge snippets.
- The Atacama is often modeled as one of Earth’s oldest deserts in long-term dryness since its aridity exhibits persistent long-tail low-precipitation statistics.
- NASA uses the Atacama for Mars analog experiments because certain surface conditions offer close morphological parallels.
- Desert blooms are rare, ephemeral events—temporal annotations that should be treated as fragile, high-value assets.
Pros & Cons
Pros
- High-quality observational conditions for astronomy — a strong signal for stargazing.
- Remarkable, diverse geotypes (salar, lagoons, geysers, lunar terrains) — high information density for photographers.
- Rich, map-driven routing possibilities — maps reduce ambiguity.
Cons
- High altitude — physiological hazards; require acclimatization, produce higher risk labels.
- Fragile ecosystems require high-penalty weights on off-route behavior.
- Rare weather outliers — necessitate contingency alternatives in the route lattice.
File type recommendations by traveler persona
Here is a schema mapping traveler personas to artifact types — useful for an automated recommendation engine.
| Traveler | Recommended files | Rationale (engineered) |
| Photographer (print fans) | A3 PDF, high-res TIFF | stable, print-first artifacts for composition |
| Cyclist/hiker | GPX route + waypoints | sequence tokens and elevation-aware profiles |
| 4×4 / Overlander | KML + GPX with alternate tracks | allows in-vehicle mapping + alternate edges |
| Stargazer/astronomer | GeoJSON dark-sky overlay + site POIs | spatial masks and node metadata for viewing |
FAQs
A: The label “driest non-polar desert” is a high-level descriptor derived from long-term climatological distributions; many subregions have extremely low recorded rainfall counts. In operational terms, treat the Atacama as having a dominant dry class with occasional low-frequency precipitation events that function as high-impact outliers. (This is why route data must include closure flags and dynamic reannotation.)
A: For canonical tourist nodes around San Pedro (Valle de la Luna, Salar de Atacama), a normal car suffices as the surface difficulty tags are low; for remote itineraries (high-alt loops, altiplano tracks), classify the route segments as high_clearance or 4x4_required during preflight checks and recommend a 4×4 with recovery gear.
A: The dry season (April–November) offers the clearest nights — the signal for stargazing is maximized when atmospheric water vapor is minimal and when the moon phase is near new moon. For optimal scheduling, intersect the dark-sky overlay with a lunar calendar and local weather forecast to compute an observation suitability score.
A: Yes—sensitive polygons (flora/fauna habitats, cultural sites) should be treated as protected; apply high penalties in route optimization to avoid them. During ephemeral desert blooms or after heavy rains, local authorities may impose temporary closures—ensure your map corpus includes authoritative source links and closure timestamps.
Conclusion
The Atacama Map Pack transforms the desert into a map-based, first planning system as opposed to a randomized tips set. It should be able to support safer decision-making, offline navigation, and designable itineraries by integrating interactive layers, GPX/KML/ GeoJSON downloads, conservative driving-time heuristics, and dark-sky overlays. You can be looping one day or planning a long-distance high-altitude trail; this corpus will allow travelers, researchers, and map-makers to plan clearly, confidently, and with consideration towards delicate environments.